Koordinat Sisteminde Vektörler
Bu bölümde vektörlerin iki ve üç boyutlu koordinat sistemlerinde gösterimini inceleyeceğiz.
İki Boyutta Vektörler
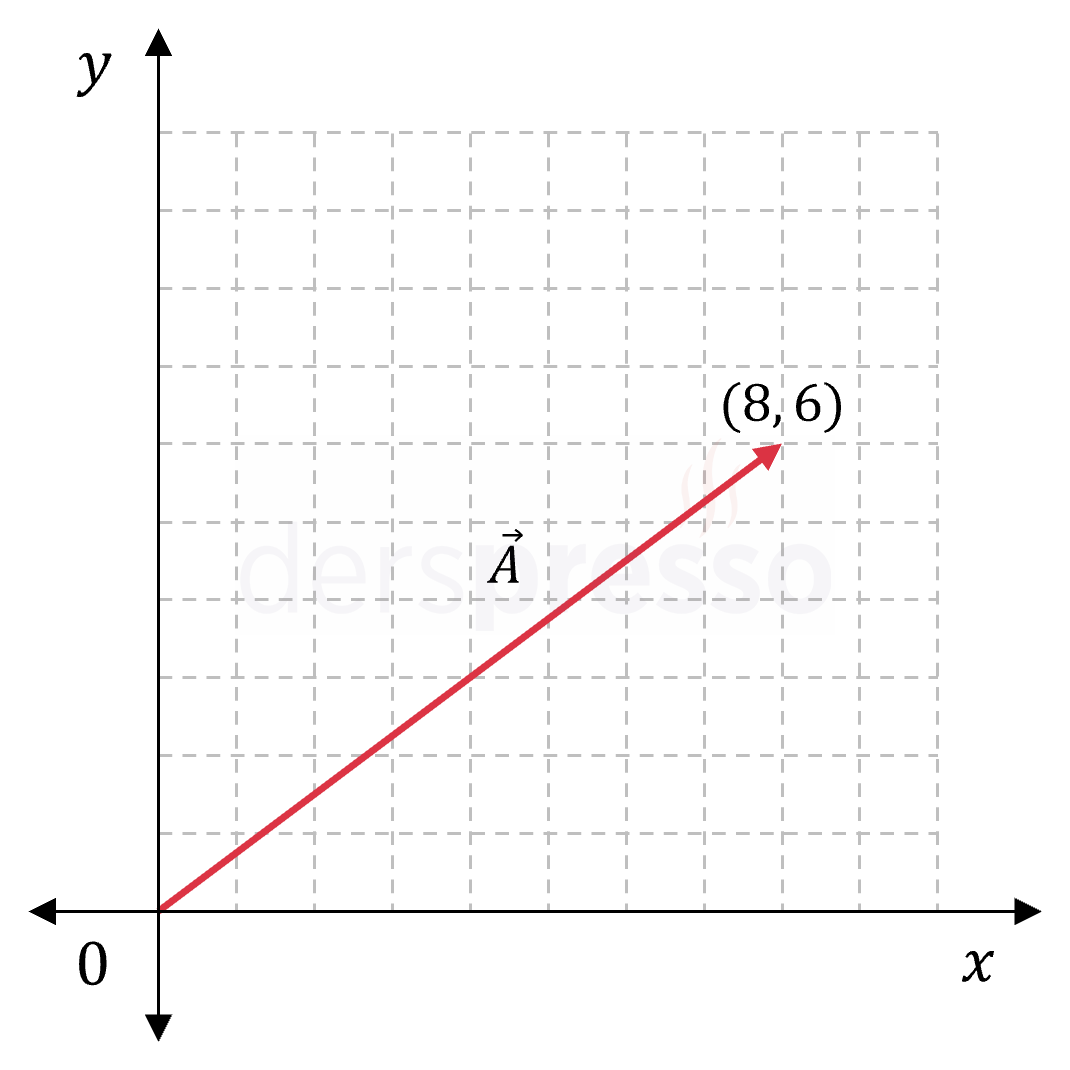
Başlangıç noktası sabit bir referans noktası olan vektörlere konum vektörü denir. Koordinat düzleminde bu referans noktası \( (0, 0) \) noktası (orijin) olarak alınır ve konum vektörleri uç noktalarının koordinatları ile ifade edilir. Konum vektörleri noktaların düzlemdeki (ya da uzaydaki) konumlarını göstermek için kullanılır.
Örnek olarak, başlangıç noktası orijin olan aşağıdaki \( \vec{a} \) vektörü bir konum vektörüdür ve uç noktasının koordinatları ile \( \vec{a} = (8, 6) \) şeklinde ifade edilir.
Bir vektörün \( (x_1, y_1) \) şeklindeki gösterimindeki sayılara vektörün koordinatları ya da bileşenleri denir.
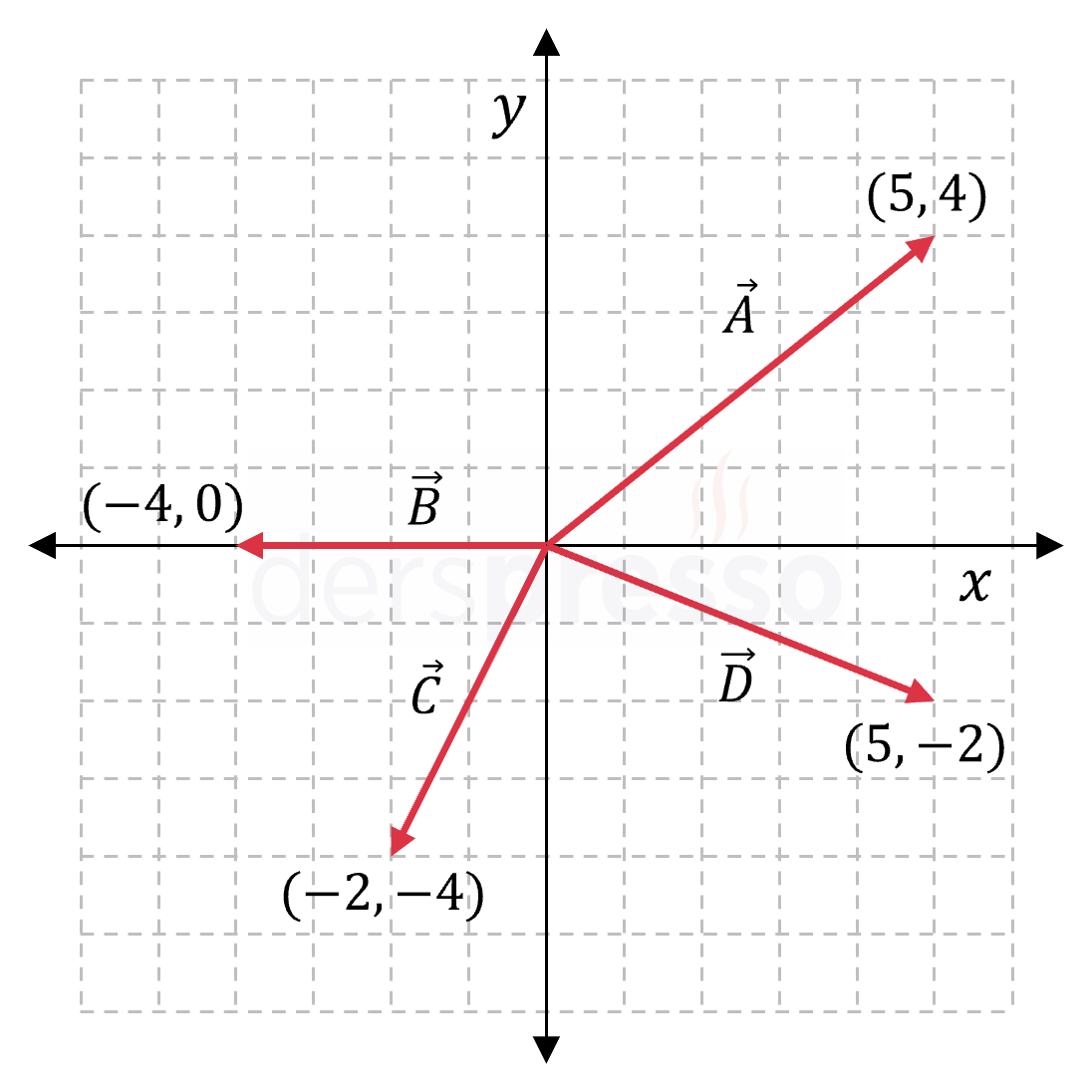
Aşağıda uç noktaları koordinat düzleminin farklı bölgelerinde olan dört konum vektörü gösterilmiştir.
Başlangıç ve bitiş noktaları bilinen bir vektör, bu noktaların temsil ettiği konum vektörlerinin koordinatlarının farkı alınarak bulunabilir.

\( A(x_1, y_1), B(x_2, y_2) \) olmak üzere,
\( \vec{AB} = (x_2 - x_1, y_2 - y_1) \)
\( O(0, 0), A(3, 6), B(10, 3) \) olmak üzere,
\( \vec{OA} = (3, 6) \)
\( \vec{OB} = (10, 3) \)
\( \vec{AB} = (10 - 3, 3 - 6) \)
\( = (7, -3) \)

Konum vektörleri sıralı ikili ya da matris şeklinde gösterilebilir.
Sıralı İkili Gösterimi
Bu gösterimde vektörün uç noktasının koordinatları bir sıralı ikili şeklinde ifade edilir.
\( x \): Vektörün uç noktasının apsisi
\( y \): Vektörün uç noktasının ordinatı
\( \vec{a} = (x_1, y_1) \)
\( \vec{a} = (8, 6) \)
Matris Gösterimi
Matris gösteriminde vektörün uç noktasının koordinatları bir sütun ya da satır matrisi şeklinde ifade edilir.
\( \vec{a} = \begin{pmatrix} x_1 \\ y_1 \end{pmatrix} \)
\( \vec{a} = \begin{pmatrix} x_1 & y_1 \end{pmatrix} \)
\( \vec{a} = \begin{pmatrix} 8 \\ 6 \end{pmatrix} \)
\( \vec{a} = \begin{pmatrix} 8 & 6 \end{pmatrix} \)
\( (x_1, y_1) \) şeklinde iki bileşenden oluşan tüm vektörler \( \mathbb{R} \times \mathbb{R} = \mathbb{R}^2 \) kümesini oluştururlar.
Üç Boyutta Vektörler
Üç boyutlu vektörler, \( x \) ve \( y \) eksenlerine dik üçüncü bir \( z \) ekseninin eklenmesiyle elde edilen üç boyutlu koordinat sistemi kullanılarak gösterilir. Aşağıda örnek bir vektörün gösterimi verilmiştir.
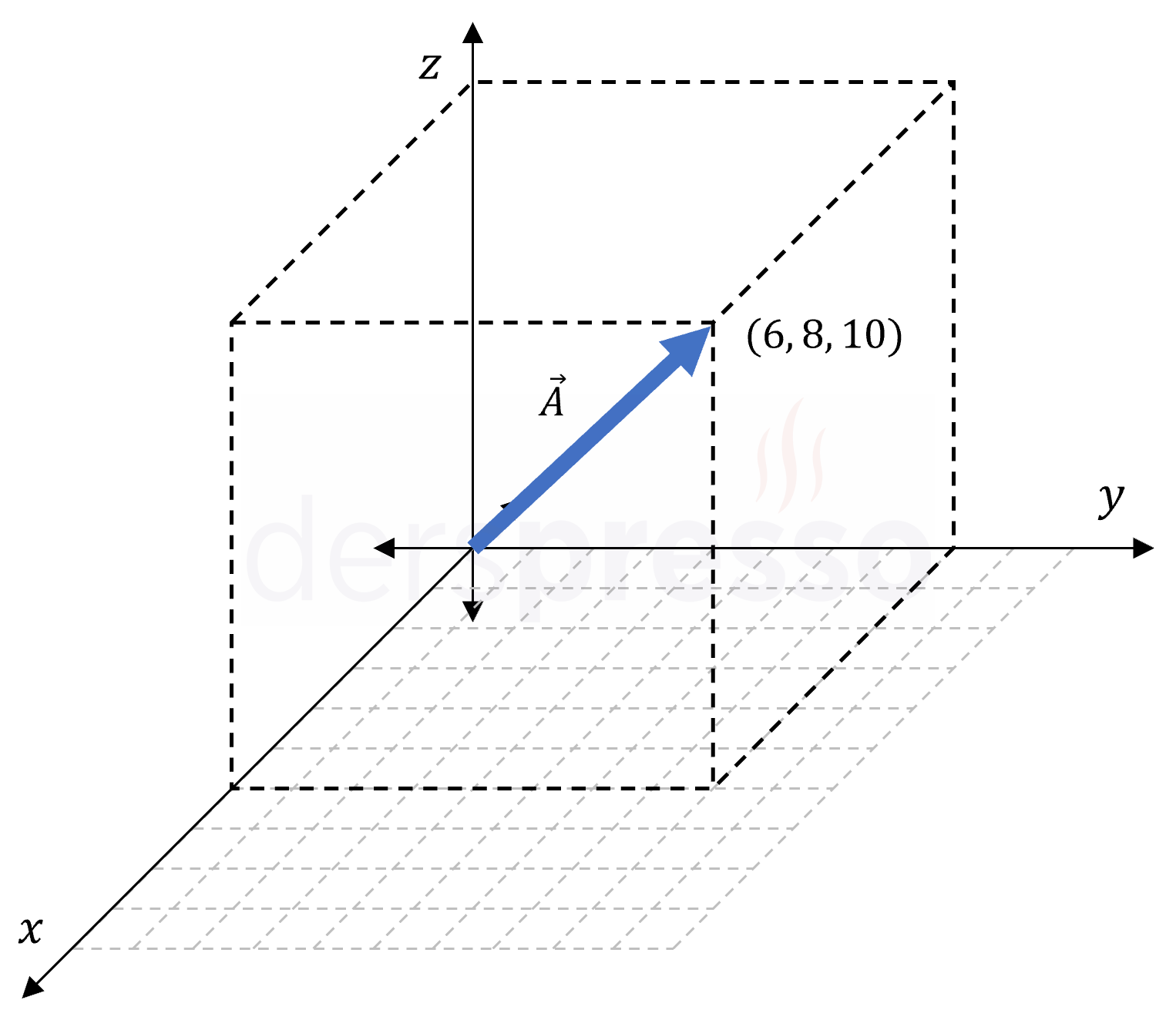
Üç boyutlu bir vektörün sıralı üçlü ve matris gösterimleri aşağıdaki gibidir. Bu gösterimde parantez içindeki bileşenler vektörün uç noktasının sırasıyla \( x \), \( y \) ve \( z \) koordinatlarını vermektedir.
\( \vec{a} = (x_1, y_1, z_1) \)
\( \vec{a} = (6, 8, 10) \)
\( \vec{a} = \begin{pmatrix} 6 \\ 8 \\ 10 \end{pmatrix} \)
\( \vec{a} = \begin{pmatrix} 6 & 8 & 10 \end{pmatrix} \)
\( (x_1, y_1, z_1) \) şeklinde üç bileşenden oluşan tüm vektörler \( \mathbb{R} \times \mathbb{R} \times \mathbb{R} = \mathbb{R}^3 \) kümesini oluştururlar.